При часовому групоутвореннi в
передавальній частині ЦСП здійснюється об'єднання компонентних цифрових
потоків, що сформовані системами передачі більш низького порядку, у груповий
(агрегатний) потік, а в приймальнiй частині здійснюється роз'єднання агрегатного потоку на компонентні.
Об'єднання (мультиплексування) цифрових потоків може бути
синх-ронним або асинхронним. Якщо генератори ЦСП, що формують
компонентні потоки, синхронізовані з генератором ЦСП, що формує агрегатний
потік, то виконується синхронне об'єднання компонентних цифрових потоків. Якщо
ж зазначена взаємна синхронізація відсутня, то здійснюється асинхронне
об'єднання цифрових потоків. Мультиплексування компонентних потоків в агрегатний у принципі може бути
побітовим (порозрядним), побайтовим (поканальним) і поцикловим (посистемним).
На практиці використовується побітове об'єднання, що вимагає найменший обсяг пристрою пам’яті (ПП).
У ЦСП синхронній цифровій
ієрархії (SDH) потоки, якi поєднуються, синхронні, а в ЦСП ієрархії PDH – майже синхронні (тактові
частоти компо-нентних систем за рахунок нестабільності генераторів незначно,
але все-таки відрізняються один від одного).
Процес
об'єднання як синхронних, так і асинхронних цифрових потоків передбачає запис
компонентних потоків у пристрій пам’яті (ПП) блока спряження (БС),
відведеного для кожного з потоків. Запис здійснюється з тактовою частотою
компонентного потоку, а зчитування – з частотою, кратною тактовій частоті
агрегатного потоку.
. Спрощена структурна схема
устаткування об'єднання цифрових потоків наведена на рис. 2.1.
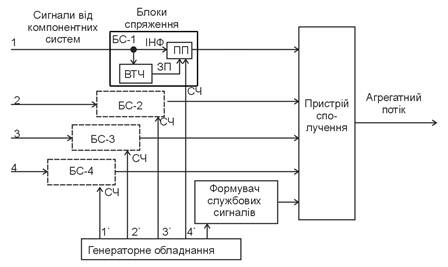
Рисунок 2.1
На рис. 2.2 зображено послiдовностi iмпульсiв запису (ЗП) і зчитування (СЧ).
В принципі співвідношення між частотами запису (![]() ) і зчитування (
) і зчитування (![]() )
) ![]() може бути як
незмінною, так і змінною величиною. Якщо
може бути як
незмінною, так і змінною величиною. Якщо ![]() (
(![]() ), то інтервал між імпульсами запису і зчитування
), то інтервал між імпульсами запису і зчитування ![]() буде постійним,
незмінним за часом.
буде постійним,
незмінним за часом.
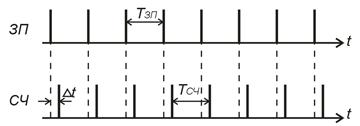
Рисунок 2.2
Якщо ж частоти ![]() і
і ![]() розрізнюються між
собою на постiйну величину (
розрізнюються між
собою на постiйну величину (![]() ), то після кожного зчитування часовий інтервал
), то після кожного зчитування часовий інтервал ![]() між моментами запису і
зчитування змінюватиметься.
між моментами запису і
зчитування змінюватиметься.
У випадку![]() величина
величина ![]() зменшується від
деякого максимального значення до нуля, а при черговому зчитуванні величина
зменшується від
деякого максимального значення до нуля, а при черговому зчитуванні величина ![]() знову виявляється
максимальною. На рис. 2.3 наведено послідовності сигналів запису і зчитування
(для конкретності прийнято
знову виявляється
максимальною. На рис. 2.3 наведено послідовності сигналів запису і зчитування
(для конкретності прийнято ![]() , вiдповiдно
, вiдповiдно ![]() ).
).
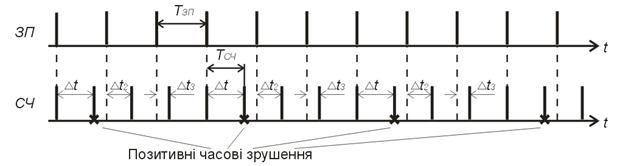
Рисунок 2.3
Оскільки частота імпульсів зчитування ![]() перевищує частоту
імпульсів запису
перевищує частоту
імпульсів запису![]() , то ПП «спустошується» до моменту
, то ПП «спустошується» до моменту![]() =0, тобто деякі імпульси зчитування виявляються зайвими і їх
необхідно вилучити, інакше будуть зчитанi «нулі» і передані як
інформаційні, що реально відсутні у загальному інформаційному потоці. Часові
позиції, що звільнилися (позитивнi часовi зміщення), можна використовувати для передачі службової
інформації. На приймальній стороні службові сигнали виділяються за ознакою
сталості їхньої частоти проходження.
=0, тобто деякі імпульси зчитування виявляються зайвими і їх
необхідно вилучити, інакше будуть зчитанi «нулі» і передані як
інформаційні, що реально відсутні у загальному інформаційному потоці. Часові
позиції, що звільнилися (позитивнi часовi зміщення), можна використовувати для передачі службової
інформації. На приймальній стороні службові сигнали виділяються за ознакою
сталості їхньої частоти проходження.
У випадку ![]() часовий інтервал
часовий інтервал![]() між моментами запису і зчитування збільшується до деякого
максимального значення, а при черговому зчитуванні він виявляється мінімальним.
На рис. 2.4 наведено послідовності сигналів запису і зчитування для випадку
між моментами запису і зчитування збільшується до деякого
максимального значення, а при черговому зчитуванні він виявляється мінімальним.
На рис. 2.4 наведено послідовності сигналів запису і зчитування для випадку ![]() , вiдповiдно
, вiдповiдно ![]() .
.

Рисунок 2.4
Оскільки при ![]() ПП переповнюється, то
виникають моменти, якi характеризуються двома
інформаційними імпульсами, що приходяться на один імпульс зчитування. Для
забезпечення нормального процесу об'єднання потоків необхідно в потік імпульсів
зчитування вводити додаткові імпульси (негативнi часовi зміщення). Сталість частоти
проходження часових зміщень дозволяє правильно відновлювати інформаційні
сигнали, передані в моменти виникнення негативних часових зміщень.
ПП переповнюється, то
виникають моменти, якi характеризуються двома
інформаційними імпульсами, що приходяться на один імпульс зчитування. Для
забезпечення нормального процесу об'єднання потоків необхідно в потік імпульсів
зчитування вводити додаткові імпульси (негативнi часовi зміщення). Сталість частоти
проходження часових зміщень дозволяє правильно відновлювати інформаційні
сигнали, передані в моменти виникнення негативних часових зміщень.
Частота часових зміщень у
зчитаної послідовності імпульсів залежить від співвідношення частот запису і
зчитування. Чим більшою мірою вони вiдрізняються, тим частіше
формуються часові зміщення. Кількість інформаційних символів (R) між сусідніми
часовими зміщеннями визначається співвідношенням
 ,
,
де ![]() – ціла частина а з надлишком.
– ціла частина а з надлишком.
Перiод
появлення часових зміщень (![]() ) визначається співвідношенням
) визначається співвідношенням
 ,
,
а частота їх виникнення (![]() ) – співвідношенням
) – співвідношенням
 .
.
Так, для наведених на рис. 2.3 і рис. 2.4 послiдовностей з позитивними i негативними часовими зміщеннями, значення R,
![]() і
і ![]() відповідно дорівнюють
відповідно дорівнюють![]()

для позитивних часових зміщень (рис. 2.3) i

для негативних часових зміщень (рис. 2.4).
Таким чином, при об’єднаннi синхронних цифрових потокiв співвідношення мiж частотами запису i зчитування незмiннi. Завдяки цьому при об’єднаннi розглядуваних потоків часовi зміщення формуются через
визначену i суворо постiйну кількість інформацiйних імпульсiв (R = const). Частота i перiодичнiсть появлення часових зміщень
також незмiнні (![]() = const;
= const; ![]() = const).
= const).
Потоки, у яких часові зміщення
(стафінги) формуються чітко через визначену і незмінну кількість інформаційних
імпульсів, є однорідними.
2.3 Об'єднання
асинхронних цифрових потоків
Цифрові потоки плезіосинхронної
ієрархії не синхронні. Тому у реальних умовах відношення ![]() змінюється за рахунок
нестабільності частот запису i зчитування. У результаті чітко періодичність появи часових зміщень порушується
– виникають неоднорідності, що призводять до того, що кількість інформаційних
імпульсів між сусідніми часовими зміщеннями не постійна. Тому значенням
змінюється за рахунок
нестабільності частот запису i зчитування. У результаті чітко періодичність появи часових зміщень порушується
– виникають неоднорідності, що призводять до того, що кількість інформаційних
імпульсів між сусідніми часовими зміщеннями не постійна. Тому значенням  визначається дробове число.
Ці неоднорідності з'являються з періодичністю, що визначається співвідношенням
визначається дробове число.
Ці неоднорідності з'являються з періодичністю, що визначається співвідношенням
 ,
,
де L – кількість часових зміщень, що
складають цикл неоднорідностей;
n – кількість неоднорідностей у цьому
циклі.
Знак вказує напрямок зміни часового інтервалу між часовими
зміщеннями. Пози-тивний знак вказує на збільшення,
а негативний – на зменшення цього інтервалу. Такі потоки є неоднорідними. На
рис. 2.5 наведено послідовності імпульсів запису і зчитування для двох
варіантів співвідношення мiж частотами запису і зчитування : ![]() і
і ![]() вiдповiдно.
вiдповiдно.
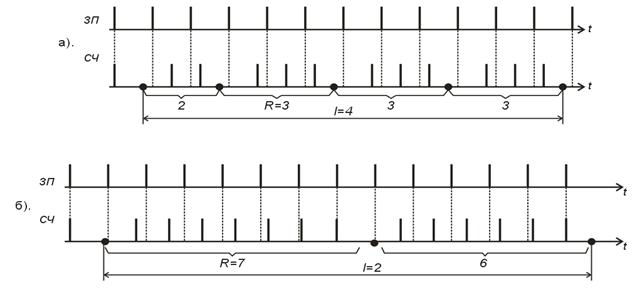
Рисунок 2.5
З рис. 2.5,а видно , що за ![]() величина
величина  імпульсу, а
імпульсу, а  . Отже, між сусідніми часовими зміщеннями R=3 імпульси, цикл неоднорідностей L=4, включаючи одну неоднорідність у
циклі (n=1). Негативний знак вказує
на зменшення інтервалу між сусідніми часовими зміщеннями під час виникнення
неоднорідністі. У розглянутому прикладі значення R змінюється вiд 3-х до 2-х.
. Отже, між сусідніми часовими зміщеннями R=3 імпульси, цикл неоднорідностей L=4, включаючи одну неоднорідність у
циклі (n=1). Негативний знак вказує
на зменшення інтервалу між сусідніми часовими зміщеннями під час виникнення
неоднорідністі. У розглянутому прикладі значення R змінюється вiд 3-х до 2-х.
За ![]() значення
значення  , а
, а  .
.
Цьому відповідає потік,
зображений на рис. 2.5,б, у якому між сусідніми часовими зміщеннями кількість
інформаційних імпульсів R=7, цикл
виникнення неоднорідностей L=2, включаючи одну неоднорідність
у циклі. Значення R змінюється від 7-ми до 6-ти.
Отже, положення часових зміщень і
кількість неоднорідностей змінюється під час зміни співвідношень між частотами
запису і зчитування. Якщо на рис. 2.5, а при заданому
співвідношенні мiж частотами запису і
зчитування виникає одна неоднорідність, то за інших
співвідношеннях цих частот з'являється інша кількість неоднорідностей. Наприклад, за ![]() величина
величина  , а
, а  .
.
Отримані результати вказують на
те, що в циклі неоднорiдностей L=5 міститься
n=2
неоднорідності, значення R змінюється від 3-х до 2-х.
Слід зазначити, що в реальних
умовах співвідношення між частотами запису і зчитування змінюється у невеликих
межах. Разом з тим очевидно, що змiщення положення часових зсувiв у послідовності імпульсів
необхідно компенсувати, щоб забезпечити передачу службової інформації на
визначених і незмінних часових позиціях. Зазначена компенсація можлива або виключенням
на передавальній стороні «зайвих» імпульсів зчитування інформаційних символів
із ЗП (за ![]() ), або їхнім додаванням (за
), або їхнім додаванням (за ![]() ). У результаті відбувається узгодження швидкості
компонентного потоку зі швидкістю агрегатного в перерахунку на один
компонентний потік. Iнформування приймальної сторони про всі операції
(виключення – додавання імпульсів зчитування) здійснюється передачею команд
узгодження швидкостей (КУШ). Крім того, в асинхронних системах для циклової
синхронізації приймального устаткування агрегатної системи в складі службових сигналів передаються синхросигнали.
Прийнятий агрегатний потік розділяється на компонентні, кожен з яких
записується у «свiй» ЗП тактами агрегатної системи з
перерахунком на компонентну, а зчитування здійснюється тактами компонентної системи.
). У результаті відбувається узгодження швидкості
компонентного потоку зі швидкістю агрегатного в перерахунку на один
компонентний потік. Iнформування приймальної сторони про всі операції
(виключення – додавання імпульсів зчитування) здійснюється передачею команд
узгодження швидкостей (КУШ). Крім того, в асинхронних системах для циклової
синхронізації приймального устаткування агрегатної системи в складі службових сигналів передаються синхросигнали.
Прийнятий агрегатний потік розділяється на компонентні, кожен з яких
записується у «свiй» ЗП тактами агрегатної системи з
перерахунком на компонентну, а зчитування здійснюється тактами компонентної системи.
У європейському варіанті
плезіосинхронної цифрової ієрархії (PDH) значення кратності частоти зчитування
дорівнює чотирьом, тобто ![]() , де
, де ![]() − тактова
частота групового (агрегатного) потоку. Так, наприклад, при об'єднанні 4-х
первинних потоків (Е1) у вторинний (Е2) частота запису кожного з потоків Е1
складає значення
− тактова
частота групового (агрегатного) потоку. Так, наприклад, при об'єднанні 4-х
первинних потоків (Е1) у вторинний (Е2) частота запису кожного з потоків Е1
складає значення ![]() кГц, а частота зчитування кожного з цих потоків
кГц, а частота зчитування кожного з цих потоків ![]() кГц. Перевищення
частоти зчитування над частотою запису дає можливість передавати в агрегатному
потоці службову інформацію, що необхідна для забезпечення нормальної роботи агрегатної
системи. Таким чином,
кГц. Перевищення
частоти зчитування над частотою запису дає можливість передавати в агрегатному
потоці службову інформацію, що необхідна для забезпечення нормальної роботи агрегатної
системи. Таким чином, ![]() , де
, де ![]() , а
, а ![]() − частота
(швидкість) передачі службових сигналів у розрахунку на один компонентний потiк. Наприклад, у ЦСП ІКМ-120 для кожної компонентної системи
(ІКМ-30) частота запису
− частота
(швидкість) передачі службових сигналів у розрахунку на один компонентний потiк. Наприклад, у ЦСП ІКМ-120 для кожної компонентної системи
(ІКМ-30) частота запису ![]() кГц, а частота зчитування
кГц, а частота зчитування ![]() кГц. Тому частота передачі службових сигналів
кГц. Тому частота передачі службових сигналів ![]() кГц у розрахунку на один компонентний потік. В агрегатному
потоці частота передачi службових сигналів у чотири рази вище:
кГц у розрахунку на один компонентний потік. В агрегатному
потоці частота передачi службових сигналів у чотири рази вище: ![]() кГц, а швидкiсть передачi агрегатного потоку складає В=4·2048+256=8448
кбіт/c.
кГц, а швидкiсть передачi агрегатного потоку складає В=4·2048+256=8448
кбіт/c.
Слід підкреслити, що номінальна
частота зчитування при об'єднанні асинхронних цифрових потоків завжди
вибирається вище частоти запису. Часові зміщення, що з'являються за рахунок
різниці номінальної частоти зчитування і частоти запису, є нормованими, тому
вони не потребують передачі інформації про їхню наявність. Часовi зміщення, якi порушують нормоване спiввiдношення частоти запису і
номінальної частоти зчитування, сприймаються як неоднорiдностi i усуваються, про що інформує
приймальна сторона.