ТЕМА 9
ТЕОРИЯ МНОГОКАНАЛЬНОЙ ПЕРЕДАЧИ СООБЩЕНИЙ
Лекция 31
ПРИНЦИПЫ МНОГОКАНАЛЬНОЙ СВЯЗИ
31.1. Основы теории разделения сигналов
31.2. Частотное, временное и фазовое разделение сигналов (каналов)
31.3. Разделение сигналов по форме
31.1. Основы теории разделения сигналов
Практика построения современных телекоммуникационных систем и сетей показывает, что наиболее дорогостоящими звеньями
трактов передачи являются линии связи (кабельные, волоконно-оптические, линии радиорелейной и спутниковой связи и др.
Поскольку экономически нецелесообразно использовать дорогостоящую линию связи для передачи информации единственной
пары абонентов, то возникает задача построения
многоканальных систем передачи
, обеспечивающих передачу большого
числа сообщений различных источников информации по общей линии связи.
Многоканальные системы так же, как и одноканальные могут быть аналоговыми и цифровыми. В качестве стандартного канала в
аналоговых системах принимают канал тональной частоты (канал ТЧ), обеспечивающий передачу сообщений в полосе частот
300…3400 Гц, соответствующей основному спектру телефонного канала. В цифровых системах за основной принимают канал со
скоростью передачи 64 кбит/с.
Многоканальные аналоговые системы
формируются путем объединения каналов ТЧ в группы, обычно кратные 12 каналам.
Цифровые системы передачи
(ЦСП) также формируются в соответствии с принятыми иерархическими структурами.
Европейская иерархия основывается на первичной ЦСП типа ИКМ–30 со скоростью группового потока 2048 кбит/с; в основу
североамериканской системы положена ИКМ–24 со скоростью группового сигнала 1544 кбит/с. ЦСП, разработанные в нашей
стране, соответствуют европейской иерархии.
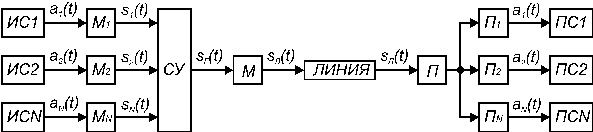
Рис. 31.1 Принцип построения систем многоканальной связи
Принцип построения систем многоканальной связи поясняется с помощью структурной схемы рис. 31.1. Пусть необходимо
организовать одновременную и независимую работу
N
индивидуальных каналов по общему групповому тракту. Считаем, что
групповой тракт может обеспечить передачу сигналов любого
i
-го канала
Si
(
t
). Предположим, что сигнал
i
-го канала
)
(
)
(
t
C
t
S
i
i
i
y
=
, (31.1)
где
)
(
t
i
y
– функция переносчика;
i
C
– некоторый коэффициент, отображающий передаваемое сообщение.
Сумма канальных сигналов образует
групповой сигнал
)
(
)
(
)
(
1
1
t
C
t
S
t
S
i
i
N
i
i
N
i
Г
y
е
е
=
=
=
=
. (31.2)
После преобразования группового сигнала в линейный, последний поступает в тракт передачи (линию связи). На приемной
стороне
)
(
t
S
Л
вновь преобразуется в групповой сигнал, т.е. к виду, удобному для выполнения операции разделения
сигналов.
Для разделения
N
канальных сигналов на приемной стороне потребуется соответствующее число
N
разделяющих устройств,
действие каждого из них описывается оператором разделения
k
p
. В идеальном случае
k
-ое разделяющее устройство должно
реагировать (“откликаться”) только на сигнал
k
-го канала
)
(
t
S
k
и давать нулевые отклики на сигналы других каналов:
{
}
о
н
м
№
=
=
ю
э
ь
о
н
м
=
=
е
=
.
0
,
)
(
)
(
1
k
i
k
i
C
t
C
t
S
k
N
i
i
i
k
Г
k
y
p
p
(31.3)
Необходимым и достаточным условием разделимости сигналов (31.3) является
условие линейной независимости
канальных сигналов.
Оно заключается в том, что тождество
0
)
(
1
є
е
=
t
C
i
i
N
i
y
(31.4)
может выполняться в том единственном случае, когда все коэффициенты
C
1,
C
2,…
C
N одновременно обращаются в ноль.
Физически это означает, что ни один из канальных сигналов не может быть образован суммой других канальных сигналов.
Критерием линейной независимости является неравенство нулю определителя Грама
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
1
2
2
2
2
1
2
1
2
1
1
1
2
1
...
.
.
.
.
.
.
...
...
,...,
,
N
N
N
N
N
N
N
Г
y
y
y
y
y
y
y
y
y
y
y
y
y
y
y
y
y
y
y
y
y
=
, (31.5)
где
(
)
k
i
y
y
– скалярное произведение. Определитель (31.5) равен нулю, если функции
N
y
y
y
,...,
,
2
1
линейно зависимы и
положителен для линейно независимых функций; он равен произведению квадратов норм функций, если
i
y
и
k
y
–
ортогональны. В частности, для ортогональных сигналов действие оператора разделения сводится к перемножению
принимаемого группового сигнала на опорную функцию переносчика
k
y
k
k
k
T
k
T
N
i
i
i
k
N
i
i
i
k
C
dt
t
t
C
dt
t
C
t
C
=
=
=
ю
э
ь
о
н
м
т
т
е
е
=
=
)
(
)
(
)
(
)
(
0
0
1
1
y
y
y
y
y
p
. (31.6)
С операцией вида (31.6) мы уже встречались при изучении когерентного детектирования и корреляционного приемника
Котельникова. И в том и в другом случае так же, как в (31.6) используется свойство ортогональности функций
)
(
t
i
y
и
)
(
k
k
y
:
{
.
,
0
,
,
1
)
(
)
(
0
k
i
k
i
dt
t
t
k
i
T
№
=
=
т
y
y
(31.7)
С позиций геометрических представлений условие (31.7) означает, что
переносчики
)
(
t
i
y
и
)
(
k
k
y
,
а, следовательно и
сигналы
)
(
t
S
i
и
)
(
k
S
k
должны занимать неперекрывающиеся области в пространстве сигналов
.
31.2. Частотное, временное и фазовое разделение сигналов (каналов)
Частотное разделение сигналов (каналов)
Проследим основные этапы формирования многоканального сигнала при частотном разделении каналов (ЧРК). Сначала в
соответствии с передаваемыми сообщениями первичные сигналы
ai
(
t
), имеющие энергетические спектры
)
(
1
w
G
,
)
(
2
w
G
,…,
)
(
w
N
G
модулируют поднесущие частоты
i
w
каждого канала. Эту операцию выполняют модуляторы
1
M
,
2
M
, … ,
N
M
канальных передатчиков. Полученные на выходе частотных фильтров
1
Ф
,
2
Ф
, … ,
N
Ф
спектры
)
(
w
i
g
канальных
сигналов занимают соответственно полосы частот
1
w
D
,
2
w
D
,…,
N
w
D
(рис.31.2).
Рис. 31.2 Схема частотного уплотнения и разделения каналов
Будем считать, что каждое из подлежащих передаче сообщений
ai
(
t
) занимает полосу частот стандартного ТЧ-канала
i
w
D
. В
процессе формирования группового сигнала каждому канальному сигналу
Si
(
t
) отводится неперекрывающаяся со спектрами
других сигналов полоса частот
i
w
D
(рис. 31.3). Тогда общая полоса частот
N
-канальной группы будет равна
е
=
=
е
D
N
i
i
1
w
w
. (31.8)
Рис.31.3 Преобразование спектров в системе с ЧРК
Считая, что применяется однополосная модуляция, а каждый канальный сигнал занимает полосу частот
W
=
D
=
=
D
=
D
N
w
w
w
...
2
1
, (31.9)
для спектра группового сигнала получим
. (31.10)
Групповой сигнал
)
(
t
S
Г
преобразуется в линейный сигнал
)
(
t
S
Л
, передается по линии связи (тракту передачи). На
приемной стороне после преобразования линейного сигнала в групповой, последний с помощью полосовых канальных
фильтров
Ф
k с полосой пропускания
i
w
D
и демодуляторов преобразуется в канальные сообщения
)
(
t
a
i
, которые
направляются получателю.
Короче говоря, в многоканальных системах с ЧРК каждому каналу отводится определенная часть общей полосы
частот группового сигнала.
На вход приемного устройства
i
-го канала одновременно действуют сигналы
Si
всех
N
каналов. С
помощью частотных фильтров
Фi
выделяются лишь те частоты
i
w
w
D
О
, которые принадлежат данному
i
-му каналу.
За счет неидеальности характеристик полосовых канальных фильтров возникают взаимные переходные помехи между
каналами. Для снижения этих помех приходится вводить защитные частотные интервалы между каналами
з
w
D
.
Таким образом
з
i
N
N
N
w
w
w
D
-
+
W
=
D
=
е
D
)
1
(
(31.11)
Это означает, что в системах с ЧРК эффективно используется лишь около 80% полосы пропускания тракта передачи. Кроме
того, необходимо обеспечить очень высокую степень линейности всего группового тракта.
Временное разделение сигналов (каналов)
При временном способе разделения каналов (ВРК) групповой тракт с помощью синхронных коммутаторов передатчика (
Кпер
) и
приемника (
Кпр
) поочередно предоставляется для передачи сигналов каждого канала многоканальной системы. (В современной
аппаратуре механические коммутаторы практически не используют. Вместо них применяют электронные коммутаторы,
выполненные, например, на регистрах сдвига.) При ВРК сначала передается сигнал 1-го канала, затем следующего и т.д. до
последнего канала за номером
N
, после чего опять подключается 1-й канал, и процесс повторяется с частотой дискретизации
Д
f
(рис.31.4).
В качестве канальных сигналов в системах ВРК используются неперекрывающиеся во времени
последовательности модулированных импульсов
Si(t)
; совокупность канальных импульсов – групповой сигнал
S
г(
t
)
передается по линии связи. Действие коммутатора на приемной стороне
Кпр
можно отождествить с ключом, соединяющим
линию с приемником
i
-го канала только на время прохождения импульсов
i
-го канала (“временной фильтр”
Фi
). После
демодуляции сообщения
ai
(
t
) поступают к
i
-му получателю.
Для нормальной работы многоканальной системы с ВРК необходима синхронная работа коммутаторов на передающей и
приемной сторонах. Часто для этого один из каналов занимают под передачу специальных импульсов синхронизации для
согласованной во времени работы
Кпер
и
Кпр.
Рис. 31.5. Временное разделение
двух сигналов с АИМ
На рис. 31.5 представлены временные диаграммы двухканальной системы с АИМ. Переносчиком сообщений здесь являются
последовательности импульсов с периодом
max
0
2
1
F
T
=
,
(31.12)
поступающих на импульсный модулятор (ИМ) от генератора тактовых импульсов (ГТИ). Групповой сигнал (рис. 31.5,а)
поступает на коммутатор
np
K
. Последний выполняет роль «временных» параметрических фильтров или ключей, передаточная
функция которых
k
K
.
(рис. 31.5,б) изменяется синхронно (с периодом
0
T
) и синфазно с изменениями передаточной функции
nep
K
:
о
н
м
D
П
D
О
=
k
k
k
t
t
t
t
K
0
1
(31.13)
Это означает, что к тракту передачи в пределах каждого временного интервала
k
t
D
подключен только
k
-й импульсный
детектор ИД-
k
. Полученные в результате детектирования
)
(
t
S
k
сообщения поступают к получателю сообщений ПС-
k
.
Оператор
k
p
,
описывающий работу ключевого фильтра, вырезает из сигнала
)
(
t
S
интервалы
k
t
D
, следующие с периодом
0
T
и отбрасывает остальную часть сигнала.
Здесь, как и ранее,
k
t
D
обозначает интервал, в течение которого передаются сигналы
k
-го источника.
При временном разделении взаимные помехи в основном обусловлены двумя причинами. Первая состоит в том, что линейные
искажения, возникающие за счет ограниченности полосы частот и неидеальности амплитудно-частотной и фазо-частотной
характеристик всякой физически осуществимой системы связи, нарушают импульсный характер сигналов. Действительно, если
при передаче модулированных импульсов конечной длительности ограничить спектр, то импульсы «расплывутся» и вместо
импульсов конечной длительности получим процессы, бесконечно протяженные во времени. При временном разделении
сигналов это приведет к тому, что импульсы одного канала будут накладываться на импульсы других каналов. Иначе говоря,
между каналами возникают взаимные переходные помехи или межсимвольная интерференция. Кроме того, взаимные помехи
могут возникать за счет несовершенства синхронизации тактовых импульсов на передающей и приемной сторонах.
Для снижения уровня взаимных помех приходится вводить «защитные» временные интервалы, что соответствует
некоторому расширению спектра сигналов. Так, в многоканальных системах телефонии полоса эффективно передаваемых
частот
F
= 3100 Гц; в соответствии с теоремой Котельникова минимальное значение
0
f
= 2
F
= 6200 Гц. Однако в
реальных системах частоту следования импульсов выбирают с некоторым запасом:
0
f
= 8 кГц. Для передачи таких
импульсов в одноканальном режиме потребуется полоса частот не менее 4 кГц. При временном разделении каналов сигнал
каждого канала занимает одинаковую полосу частот, определяемую в идеальных условиях согласно теореме Котельникова из
соотношения (без учета канала синхронизации)
общ
k
F
NF
N
T
t
2
1
2
1
0
=
=
=
D
, (31.14)
где
NF
F
общ
=
,
что совпадает с общей полосой частот системы при частотном разделении.
Хотя теоретически ВРК и ЧРК эквивалентны по эффективности использования частотного спектра, однако в реальных условиях
системы ВРК заметно уступают ЧРК по этому показателю из-за трудностей снижения уровня взаимных помех при разделении
сигналов. Вместе с тем, неоспоримым преимуществом ВРК является снижение уровня помех нелинейного происхождения за
счет разновременности действия импульсов различных каналов, в системах ВРК ниже пик-фактор. Существенно также, что
аппаратура ВРК значительно проще аппаратуры ЧРК. Наиболее широкое применение ВРК находит в цифровых системах с
ИКМ.
Фазовое разделение сигналов.
Рассмотрим теперь множество синусоидальных сигналов:
п
п
о
п
п
н
м
+
=
+
=
+
=
+
=
).
sin(
)
(
......
..........
..........
..........
);
sin(
)
(
....
..........
..........
..........
);
sin(
)
(
);
sin(
)
(
0
0
2
0
2
2
1
0
1
1
N
N
N
k
k
k
t
A
t
S
t
A
t
S
t
A
t
S
t
A
t
S
j
w
j
w
j
w
j
w
(31.15)
Здесь подлежащая передаче информация содержится в, изменениях амплитуды
k
A
(амплитудная модуляция), несущая
частота сигналов
0
w
— одна и та же, а сигналы различаются начальными фазами
k
j
.
Среди множества
N
сигналов (31.15) лишь любые два сигнала являются линейно-независимыми; любые
2
>
n
сигналов
линейно-зависимы это означает, что на одной несущей частоте
0
w
при произвольных значениях амплитуд
i
A
и
k
A
и фаз
i
j
и
k
j
можно обеспечить лишь двухканальную передачу.
На практике преимущественно используют значение
1
j
-
2
2
p
j
=
:
)
sin(
)
(
0
1
1
t
A
t
S
w
=
,
)
cos(
)
2
sin(
)
(
0
2
0
2
2
t
A
t
A
t
S
w
p
w
=
+
=
. (31.16)
При этом сигналы
)
(
1
t
S
и
)
(
2
t
S
ортогональны, что облегчает реализацию системы и улучшает ее энергетические
показатели.
31.3. Разделение сигналов по форме
Для разделения сигналов могут использоваться не только такие очевидные признаки, как частота, время и фаза. Наиболее
общим признаком является форма сигналов. Различающиеся по форме сигналы могут передаваться одновременно и иметь
перекрывающиеся частотные спектры, и тем не менее такие сигналы можно разделить, если выполняется условие их линейной
независимости или условие ортогональности. Пусть в качестве переносчиков выбраны импульсы, последовательность которых
образует, няпример, степенной ряд:
1
1
=
Y
,
t
=
Y
2
,
2
3
t
=
Y
,…
T
t
Ј
Ј
0
. (31.17)
В предположении, что информация содержится в коэффициентах
1
c
,
2
c
, ..., для группового сигнала запишем
1
2
1
...
1
)
(
-
+
+
+
Ч
=
N
N
Г
t
c
t
c
c
t
S
.
(31.18)
Члены ряда (31.17) линейно-независимы, и, следовательно, ни один из канальных сигналов
1
-
k
t
c
k
не может быть образован
линейной суммой всех других сигналов. Это легко понять, обратив внимание на то, что многочлен от
t
вида (31.18) может
быть тождественно равен нулю только в том случае, когда все его коэффициенты равны нулю.
Для разделения таких сигналов можно применить общий метод в соответствии с условием линейной независимости
переносчиков (31.7). Так, при двух-канальной передаче имеем для интервала
T
t
Ј
Ј
0
t
c
c
t
S
Г
2
1
1
)
(
+
Ч
=
,
если далее весовые функции выбрать удовлетворяющими условиям разделения:
п
о
п
н
м
+
-
=
Y
+
Y
-
=
Y
+
Y
=
-
=
Y
-
Y
=
Y
+
Y
=
.
12
6
12
6
)
(
,
6
4
6
4
)
(
2
1
2
22
1
21
2
2
1
2
12
1
11
1
T
t
T
T
T
a
a
t
T
t
T
T
T
a
a
t
h
h
(31.19)
то в результате операций проектирования
п
п
п
о
п
п
п
н
м
=
Y
Y
+
Y
Y
-
Y
Y
+
Y
Y
-
=
=
=
=
Y
Y
-
Y
Y
+
Y
Y
-
Y
Y
=
=
=
т
т
2
2
2
2
2
1
2
1
1
1
2
1
1
0
2
2
1
2
2
2
1
2
2
2
2
1
1
1
1
1
0
1
)
(
12
)
(
6
)
(
12
)
(
6
)
(
)
(
)
(
,
)
(
6
)
(
4
)
(
6
)
(
4
)
(
)
(
)
(
c
c
c
c
c
dt
t
t
s
t
c
c
c
c
c
dt
t
t
s
S
T
T
h
p
h
p
(31.20)
[здесь
,
1
)
(
1
1
=
Y
Y
,
3
1
)
(
2
2
=
Y
Y
2
1
)
(
)
(
1
2
2
1
=
Y
Y
=
Y
Y
].
Операции (31.20) выполняются разделяющим устройством, изображенным на рис. 31.6. В отличие от устройств разделения
ортогональных сигналов здесь добавляется устройство формирования весовых функций
1
h
и
2
h
, которое из функций
1
Y
и
2
Y
образует линейные комбинации вида (31.19).
При выборе сигналов для систем многоканальной связи с разделением по форме часто используется ортогонализация сигналов
- операция преобразования линейно-независимых сигналов в ортогональные.
В последние годы успешно .развиваются цифровые методы разделения сигналов по их форме, в частности, в качестве
переносчиков различных каналов используются дискретные ортогональные последовательности в виде функций Уолша,
Радемахера и другие. Функции Радемахера образуются из синусоидальных функций с помощью соотношения:
[
]
)
2
sin(
)
(
pq
q
k
k
sign
r
=
,
1
0
<
Ј
q
где аргумент
T
t
=
q
— безразмерное время;
Т
— период функции, а положительное целое число
k
=0, 1, 2, ... — порядок
функции;
[
]
x
sign
— знак действительного числа
x
;
[
]
1
=
x
sign
при
0
>
x
и
[
]
1
-
=
x
sign
при
0
<
x
. Иначе говоря,
функции Радемахера, принимающие значения ±1, можно трактовать как функции «прямоугольного синуса».
Рис. 31.7. Графики первых четырех функций Радемахера
На рис. 31.7 приведены в качестве примера графики первых четырех функций Радемахера
)
(
q
k
r
для
k
=0, 1, 2, 3. Легко
видеть, что функции
)
(
q
k
r
ортонормированы на интервале
1
0
<
Ј
q
:
{
.
0
,
1
)
(
)
(
1
0
k
i
k
i
d
r
r
k
i
№
=
=
т
q
q
q
Дальнейшим развитием системы функции, имеющих форму «прямоугольной волны», является система функций Уолша {
}. Она образуется следующим образом. По определению вводится функция {
}= 1 при
=0.
Для получения функции
при
достаточно записать число
т
в двоичной системе счисления, т. е. представить
суммой
p
m
m
m
m
2
...
2
2
2
1
+
+
+
=
где
p
m
m
m
<
<
<
...
2
1
— положительные целые числа.
При: этом функция Уолша
)
(
)...
(
)
(
)
,
(
1
1
1
2
1
q
q
q
q
m
m
m
+
+
+
=
p
r
r
r
m
wal
.
Порядок
k
функции Уолша
)
(
q
k
wal
- равен числу знакоперемен на интервале (0, 1/2) и определяется как
2
m
k
=
для
четных
т
и
2
1
+
=
m
k
для нечетных
т.
На рис. 31.8 приведены графики первых восьми функций Уолша
)
,
0
(
q
wal
,
)
,
1
(
q
wal
,…,
)
,
7
(
q
wal
, построенных по
четырем функциям Радемахера.
Функции Уолша не только ортогональны, они обладают свойством мультипликативности. Это означает, что произведение любых
двух функций Уолша также является функцией Уолша.
В связи с возможностью применения к функциям Уолша логических операций, они являются весьма перспективными при
разработке многоканальных цифровых систем передачи с разделением по форме, а также в аппаратуре формирования и
преобразования сигналов на базе микропроцессорной техники.
Широкое развитие методов разделения по форме сигналов привело к созданию систем передачи с разделением «почти
ортогональных» сигналов, представляющих собой псевдослучайные последовательности, корреляционные функции и
энергетические спектры которых близки к аналогичным характеристикам «ограниченного» белого шума. Такие сигналы
называют
шумоподобными.
В цифровых многоканальных системах с разделением по форме используют ортогональные последовательности в виде функций
Уолша (аналоги “прямоугольных” синусов и косинусов). Каждому каналу выделяется свой “адрес” в виде формы
последовательности импульсов. Операция разделения группового сигнала на приемной стороне осуществляется с помощью
набора корреляционных приемников, опорные колебания для которых известны на приемной стороне.
Обобщением разделения по форме, являются
асинхронно-адресные системы связи (ААСС)
. В ААСС жесткое требование
ортогональности заменяется более гибким требованием “почти ортогональных” сигналов. К ним относятся прежде всего
шумоподобные сигналы, для которых функция корреляции подобна функции корреляции белого шума с ограниченным спектром.
Шумоподобные сигналы формируются на основе псевдослучайных последовательностей. Форма последовательности
используется в качестве “адреса” канала. Важным достоинством ААСС является то, что здесь нет необходимости в центральной
коммутационной станции: достаточно набрать “адрес” вызываемого абонента, т.е. изменить “форму” импульсной адресной
последовательности. Другим достоинством является то, что вследствие свободного доступа к линии связи могут вести передачу
любые
Nа
активных абонента из общего числа N абонентов системы, причем
N
>>
Nа
. В таких системах легко реализуются
резервы пропускной способности, возникающие за счет “мало активных” абонентов, так, например, можно организовать
1000-канальную систему связи, в которой одновременно ведут передачу любые 50– 100 абонентов из тысячи.